October 13, 2018
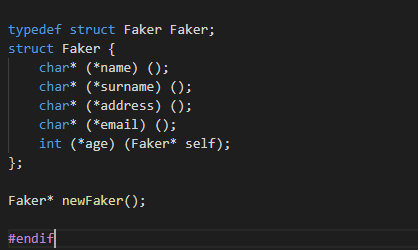
Simulating object oriented programming (OOP) in C
Most of the languages support OOP out of the box, but many people are not aware that OOP and even functional programming can be done also in C (even though it is not very practical, unless we use some macros to hack our way through and make it more convenient by reducing the boilerplate code). In this tutorial I will...